-
ELEKTROMOTORY
- Asynchronní motory
-
Stejnosměrné motory
- DC motory
-
BLDC motory
-
DUNKERMOTOREN BG
- BGA 22 dCore
- BGA 22 dGo
- BGA 32 dCore
- BG 32 KI
- BG 42 dCore
- BG 42 KI
- BG 45
- BG 45 SI
- BG 45 PI/MI
- BG 45 CI/PB/EC
- BG 45 SMD
- BG 62 dCore
- BG 65 dCore
- BG 65
- BG 65 SI
- BG 65 PI/MI
- BG 65S
- BG 66 dPro CO/IO
- BG 65S SI
- BG 65S SMD
- BG 65 CI/PB/EC
- BG 66 dPro PN/EC/EI
- BG 65S CI/PB/EC
- BG 65 dMove
- BG 65S PI/MI
- BG 66 dMove
- BG 75
- BG 75 SMD
- BG 75 SI
- BG 75 dPro CO/IO
- BG 75 PI/MI
- BG 75 dPro PN/EC/EI
- BG 75 CI/PB/EC
- BG 95 dCore
- BG 95 dPro CO/IO
- BG 95 SMD
- TRANSTECNO BL/BLS
- FASTECH Ezi-SPEED
-
DUNKERMOTOREN BG
- Příslušenství
- Servomotory
-
Krokové motory
- Bez zpětné vazby
-
Se zpětnou vazbou
-
Ezi-SERVO
- Ezi-SERVO II Plus-E
- EZI-SERVO ST
- EZI-SERVO MINI
- EZI-SERVO PLUS-R
- EZI-SERVO PLUS-R MINI
- EZI-SERVO II BT
- EZI-SERVO ALL
- Ezi-SERVO II EtherCAT
- Ezi-SERVO II EtherCAT TO
- Ezi-SERVO II EtherCAT MINI
- Ezi-SERVO II EtherCAT 4X
- Ezi-SERVO II EtherCAT ALL
- Ezi-SERVO II Plus-E MINI
- Ezi-SERVO II Plus-E ALL
- Ezi-SERVO II CC-Link
- Ezi-SERVO HS
- S-SERVO
-
Ezi-SERVO
- Příslušenství
- Lineární motory
- Momentové motory
- Trakční motory
-
Vřetenové motory
-
Vřetena s manuální výměnou nástroje
- MULTITECH XS
- MULTITECH S
- MULTITECH MA
-
MULTITECH ML
- ML-1C 7,5-12 24 ER 32DX
- ML-1C 7.5/12 24 ER 40
- ML-1C 7.5/12 24 ER32 DX-SX
- ML-1C 7.5/12 24 2ER 40DX
- ML-1C 7.5/12 24 ER32 CROSS 2+2 ENDS
- ML-1C 10/12 24 ER 32DX
- ML-1C 10/12 24 ER 40DX
- ML-1C 10/12 24 ER 32 DX-SX
- ML-1C 10/12 24 ER40 DX-SX
- ML-1C 10/12 24 ER32 CROSS 2+2 ENDS
- ML-2 9.5/12 24 ER 40DX
- ML-2 9.5/12 24 ER40 DX-SX
- ML-2 12/12 24 ER 40DX
- ML-2 12/12 24 ER40 DX-SX
- ML-2 12/12 24 ER40 CROSS 2+2 ENDS
- MULTITECH QN
- MULTITECH MQH
- Vřetena s automatickou výměnou nástroje
- Obráběcí hlavy
-
Příslušenství
- Držák nástroje HSK63F-ER32
- Držák nástroje HSK63A-ER32
- Držák nástroje ISO30-ER32
- Odkládací držák nástroje HSK63F
- Odkládací držák nástroje HSK63A
- Odkládací držák nástroje ISO30
- C-OSA
- iM smart senzor
- Výměník tepla pro elektrovřetena HITECO
- Agregované jednotky
- Výměníky nástrojů
-
Vřetena s manuální výměnou nástroje
- PŘEVODOVKY
-
LINEÁRNÍ TECHNIKA
- Lineární vedení
- Polohovací lineární jednotky
- Aktuátory
- SCARA roboty
- Zdvižné převodovky
- Ozubené hřebeny a pastorky
- Spojky
-
ŘÍZENÍ
- Frekvenční měniče
- Servo řízení
- Řízení stejnosměrných motorů
- Řízení krokových motorů
- Řízení kompaktních motorů
- Řízení trakčních motorů
-
Řízení aktuátorů
- Řídicí jednotky
-
Ruční ovladače
- TDH1
- TDH2
- TDH3
- TDH4
- TDH5
- TDH5C
- TDH5PR
- TDH6
- TDH6PR
- TDH8
- TDH8D
- TDH8P
- TDH9P
- TDH11P
- TDH12P
- TDH13P
- TDH15
- TDH16
- TDH17
- TDH18P
- TDH19P
- TDH20P
- TDH24P
- TDH27P
- TDH29
- TFH1
- TFH2
- TFH3
- TFH4
- TFH5
- TFH6
- TFH7
- TFH7P
- TFH7S
- TFH8
- TFH11
- TFH13
- TFH15
- TFH16
- TFH17
- TFH21
- TFH22
- TFH25
- TFH27
- TFH28
- TFH32
- TFH33
- TFH34
- TFH35
- TFS
- TFS2
- TFS3
- TFS5
- TFS6
- TFS7
- TFS8
- TFS9
- TH1
- TH2
- TH3
- TH4
- TH5
- TH6
- TH7
- TH7R
- TH8
- TH9
- TH10
- TH11
- TH12
- TH13
- TH14
- TH15
- TH16
- TH17
- TH19
- TH21
- TH23
- TH24
- TH25
- TH26
- TH30
- TH37
- TMH1
- TMH3
- TMH5
- TMH7
- TMH9
- TMH11
- TMH12
- TMH13
- TMH15
- TMH16
- TMH17
- TMH18
- TMH19
- TMH21
- TMH26
- TMH29
- TNP1
- TNP2
- TNP3
- TNP4
- TNP5
- TNP6
- TNP7
- TNP8
- TNP10
- Napájecí zdroje
- Příslušenství
- Komunikační brány
- Digitální I/O
- Analogové I/O
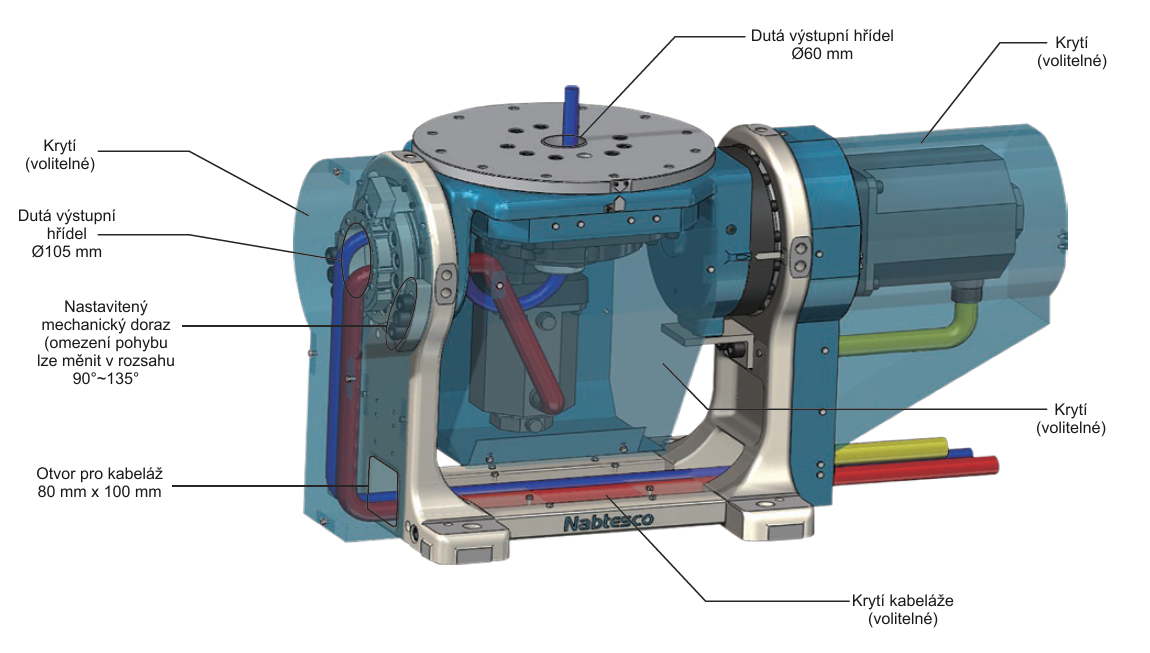
ŘADA RVP-A
- max. povolené zatížení: 500 kg
- max. zatížení od středu: 300 mm
- ⌀ duté hřídele: ⌀61 / ⌀105
- povolený START/STOP točivý moment: 2,450 Nm (rotační osa); 4,000 Nm (klopná osa)
- max. klopný úhel: ± 135°
- hmotnost: 300 kg

Představujeme kompaktní dvouosé polohovadlo z řady RVP-A. Toto polohovadlo, díky inovativní technologii, využívá pro svůj chod dvou samostatných cykloidních převodovek. Jedna z nich slouží pro ovládání rotační osy, druhá pak ovládá osu klopnou. Polohovadla z řady RVP-A jsou vhodné pro polohovací aplikace zejména v oblasti robotiky, svařování, indexace polohy a jsou velmi vhodné i pro využití v Automotive Industry. Zákazníci je rovněž často instalují do dodatečných robotických pracovišť, která mají široké spektrum využití.

Polohovadla NABTESCO řady RVP-A je možné spojit se všemi standardními typy servomotorů. Výhodou jsou velmi kompaktní rozměry a robustnost celého řešení. Polohovadla RVP lze navíc jednoduše nainstalovat a díky tomu rychle uvést do provozu. Nemusíte se tak tedy obávat zvýšených časových nebo finančních nákladů.
Klíčové vlastnosti a výhody:
- robotický průmysl je ideálním prostředím pro aplikaci převodovek RVP-A (přesné polohování s indexací polohy),
- převodovka se vyrábí ve dvou variantách – standardní nebo vysokorychlostní provedení,
- k dispozici je na výběr z širokých převodových poměrů až do převodu 1 : 155,
- maximální zatížení převodovky je 500 kg,
- maximální START/STOP výstupní točivý moment činí 2 450 Nm u rotační osy, 4 000 Nm pak u klopné osy,
- vstupní příruby jsou podporované pro všechny běžně dostupné servomotory,
- k dispozici je široká škála konfigurací (kryty a zátky na míru – v závislosti na typu použitého elektromotoru).
Příklady aplikace:

Konfigurátor pro tento typ produktu není dostupný.
3D modely žádejte na info@raveo.cz.
Představení společnosti Nabtesco – korporátní video pro rok 2018
Nabtesco Corporation je japonský výrobce cykloidních převodovek s historií od roku 1925. Firma vznikla spojením dvou společností a to Teijin Seiki a NABCO. V současné době má společnost několik divizí v oblastech automatizace a dopravní techniky. Nabtesco je světovým lídrem ve výrobě cykloidních převodovek a kompaktních pohonů. V referencích Nabtesca najdete jedničky v oboru kybernetiky, kteří oceňují u převodovek především vysokou tuhost, přesnot a minimální rozměry. Převodovky Nabtesco využívá více než 60 procent robotů a to celosvětově.
Princip cykloidní převodovky Nabtesco s výstupní přírubou
Cykloidní převodovky patří prakticky mezi nejvyspělejší reduktory vůbec. Tyto převodovky nabízí max. přesnost, tuhost a zatížitelnost ve velmi kompaktním provedení. Cykloidní převodovky se používají ve velké míře v robotice (Nabtesco má 70 procent trhu). Mezi typické aplikace patří rotační polohovací stoly, zásobníky nástrojů u obráběcích strojů či přesné manipulátory.
Princip cykloidní převodovky Nabtesco s výstupní přírubou a dutou hřídelí
Cykloidní převodovky Nabtesco se využívají pro aplikací kde je nutná vysoká torzní tuhost, přesnost, účinnost a kompaktní rozměry. Nabtesco jako jediný výrobce nabízí rozsah převodových poměrů od 27 do 258. Cykloidní převodovky lze přetížit až o 500 procent. Uvnitř cykloidní převodovky je implementováno centrální ložiko, což umožňuje použít tuto převodovku přímo v kloubu robota či u otočného stolu.
Integrace cykloidních převodovek do robotů
Cykloidní převodovky Nabtesco jsou celosvětově nejvyužívanější převodovky pro robotiku a využívají je všichni výrobci robotů. Převodovky jsou vyhledávány pro kompaktní rozměry, vysoké převodové poměry, přesnost 1 arc.min a vysokou přetížitelnost (až 5xnominální moment). Pro všechny osy robota máme vhodnou velikost.
Cykloidní převodovky využívané v CNC obráběcích strojích
Cykloidní převodovky Nabtesco jsou díky malým rozměrům a přesnosti využívané v CNC strojích. Mezi časté využití patří polohování obráběcích hlav, rotační stoly a také zásobníky nástrojů. Mezi zákazníky Nabtesco patří lídři v oboru CNC strojů.
Cykloidní převodovky pro DELTA roboty
Při konstrukci delta robotů se často konstruktéři potýkají s problém s převodovkami. Technologie delta robotů vyžaduje malé rozměry, vysokou opakovatelnost a rychlost. Cykloidní převodovky Nabtesco – RF jsou uzpůsobené pro tento typ aplikace včetně optimalizace mazání.
Cykloidní převodovky pro SCARA roboty
Pro SCARA roboty lze využít cykloidních převodovek Nabtesco. Mezi základní benefity tohoto řešení je především vysoká a dlouhodobá opakovatelnost při vysoké dynamice. Cykloidní převodovky Nabtesco je osvědčené řešení pro robotiku mnoho desítek let.
Cykloidní převodovky pro medicínské aplikace
Medicínské stroje jsou prakticky jedny z nejvyspělejší technologie s požadavky na vysokou užitnou hodnotu a bezpečnost. Cykloidní převodovky jsou odůvodněným řešením pro přesné polohování.
Cykloidní převodovky Nabtesco pro manipulátory
Mezi velmi časté využití cykloidních převodovek patří integrace do manipulátorů, které jsou využívané jako přídavné osy pro robota. Toto řešení je především využívané u svařovacích robotických buněk. Parametry cykloidních převodovek jsou integrovány prakticky u všech řídících systému robotů. Parametrizace je pak velmi jednoduchá a přídavné osy lze řídit v rámci jednoho systému.