-
ELEKTROMOTORY
- Asynchronní motory
-
Stejnosměrné motory
- DC motory
-
BLDC motory
-
DUNKERMOTOREN BG
- BGA 22 dCore
- BGA 22 dGo
- BGA 32 dCore
- BG 32 KI
- BG 42 dCore
- BG 42 KI
- BG 45
- BG 45 SI
- BG 45 PI/MI
- BG 45 CI/PB/EC
- BG 45 SMD
- BG 62 dCore
- BG 65 dCore
- BG 65
- BG 65 SI
- BG 65 PI/MI
- BG 65S
- BG 66 dPro CO/IO
- BG 65S SI
- BG 65S SMD
- BG 65 CI/PB/EC
- BG 66 dPro PN/EC/EI
- BG 65S CI/PB/EC
- BG 65 dMove
- BG 65S PI/MI
- BG 66 dMove
- BG 75
- BG 75 SMD
- BG 75 SI
- BG 75 dPro CO/IO
- BG 75 PI/MI
- BG 75 dPro PN/EC/EI
- BG 75 CI/PB/EC
- BG 95 dCore
- BG 95 dPro CO/IO
- BG 95 SMD
- TRANSTECNO BL/BLS
- FASTECH Ezi-SPEED
-
DUNKERMOTOREN BG
- Příslušenství
- Servomotory
-
Krokové motory
- Bez zpětné vazby
-
Se zpětnou vazbou
-
Ezi-SERVO
- Ezi-SERVO II Plus-E
- EZI-SERVO ST
- EZI-SERVO MINI
- EZI-SERVO PLUS-R
- EZI-SERVO PLUS-R MINI
- EZI-SERVO II BT
- EZI-SERVO ALL
- Ezi-SERVO II EtherCAT
- Ezi-SERVO II EtherCAT TO
- Ezi-SERVO II EtherCAT MINI
- Ezi-SERVO II EtherCAT 4X
- Ezi-SERVO II EtherCAT ALL
- Ezi-SERVO II Plus-E MINI
- Ezi-SERVO II Plus-E ALL
- Ezi-SERVO II CC-Link
- Ezi-SERVO HS
- S-SERVO
-
Ezi-SERVO
- Příslušenství
- Lineární motory
- Momentové motory
- Trakční motory
-
Vřetenové motory
-
Vřetena s manuální výměnou nástroje
- MULTITECH XS
- MULTITECH S
- MULTITECH MA
-
MULTITECH ML
- ML-1C 7,5-12 24 ER 32DX
- ML-1C 7.5/12 24 ER 40
- ML-1C 7.5/12 24 ER32 DX-SX
- ML-1C 7.5/12 24 2ER 40DX
- ML-1C 7.5/12 24 ER32 CROSS 2+2 ENDS
- ML-1C 10/12 24 ER 32DX
- ML-1C 10/12 24 ER 40DX
- ML-1C 10/12 24 ER 32 DX-SX
- ML-1C 10/12 24 ER40 DX-SX
- ML-1C 10/12 24 ER32 CROSS 2+2 ENDS
- ML-2 9.5/12 24 ER 40DX
- ML-2 9.5/12 24 ER40 DX-SX
- ML-2 12/12 24 ER 40DX
- ML-2 12/12 24 ER40 DX-SX
- ML-2 12/12 24 ER40 CROSS 2+2 ENDS
- MULTITECH QN
- MULTITECH MQH
- Vřetena s automatickou výměnou nástroje
- Obráběcí hlavy
-
Příslušenství
- Držák nástroje HSK63F-ER32
- Držák nástroje HSK63A-ER32
- Držák nástroje ISO30-ER32
- Odkládací držák nástroje HSK63F
- Odkládací držák nástroje HSK63A
- Odkládací držák nástroje ISO30
- C-OSA
- iM smart senzor
- Výměník tepla pro elektrovřetena HITECO
- Agregované jednotky
- Výměníky nástrojů
-
Vřetena s manuální výměnou nástroje
- PŘEVODOVKY
-
LINEÁRNÍ TECHNIKA
- Lineární vedení
- Polohovací lineární jednotky
- Aktuátory
- SCARA roboty
- Zdvižné převodovky
- Ozubené hřebeny a pastorky
- Spojky
-
ŘÍZENÍ
- Frekvenční měniče
- Servo řízení
- Řízení stejnosměrných motorů
- Řízení krokových motorů
- Řízení kompaktních motorů
- Řízení trakčních motorů
-
Řízení aktuátorů
- Řídicí jednotky
-
Ruční ovladače
- TDH1
- TDH2
- TDH3
- TDH4
- TDH5
- TDH5C
- TDH5PR
- TDH6
- TDH6PR
- TDH8
- TDH8D
- TDH8P
- TDH9P
- TDH11P
- TDH12P
- TDH13P
- TDH15
- TDH16
- TDH17
- TDH18P
- TDH19P
- TDH20P
- TDH24P
- TDH27P
- TDH29
- TFH1
- TFH2
- TFH3
- TFH4
- TFH5
- TFH6
- TFH7
- TFH7P
- TFH7S
- TFH8
- TFH11
- TFH13
- TFH15
- TFH16
- TFH17
- TFH21
- TFH22
- TFH25
- TFH27
- TFH28
- TFH32
- TFH33
- TFH34
- TFH35
- TFS
- TFS2
- TFS3
- TFS5
- TFS6
- TFS7
- TFS8
- TFS9
- TH1
- TH2
- TH3
- TH4
- TH5
- TH6
- TH7
- TH7R
- TH8
- TH9
- TH10
- TH11
- TH12
- TH13
- TH14
- TH15
- TH16
- TH17
- TH19
- TH21
- TH23
- TH24
- TH25
- TH26
- TH30
- TH37
- TMH1
- TMH3
- TMH5
- TMH7
- TMH9
- TMH11
- TMH12
- TMH13
- TMH15
- TMH16
- TMH17
- TMH18
- TMH19
- TMH21
- TMH26
- TMH29
- TNP1
- TNP2
- TNP3
- TNP4
- TNP5
- TNP6
- TNP7
- TNP8
- TNP10
- Napájecí zdroje
- Příslušenství
- Komunikační brány
- Digitální I/O
- Analogové I/O
EZI-SERVO II ETHERCAT ALL – KROKOVÉ MOTORY SE ZPĚTNOU VAZBOU A ETHERCAT SBĚRNICÍ
- Ezi-SERVO II EtherCAT ALL – krokové motory se zpětnou vazbou
- přídržný moment: 0,44~12 N.m
- rozlišení enkodéru: 10000 / 20000 pulzů/ot.
- Přípustná okolní teplota: 0°C~+50°C
- napájecí napětí: 24 VDC / 40~70 VDC
Velikosti:

- Systém Ezi-SERVO II EtherCAT ALL představuje integrované all-in-one řešení se zabudovanou řídicí jednotkou a zpětnou vazbou na krokovém motoru.
- Řídicí jednotka používá sběrnici EtherCAT, přičemž celý systém se chová jako slave modul s podporou aplikační vrstvy protokolu CANopen a implementací EtherCAT (CoE – CANopen over EtherCAT) podle profilu zařízení pro elektrické pohony CiA402.
- Toto rozhraní významně zjednodušuje integraci systému Ezi-SERVO II EtherCAT ALL do průmyslových sítí a celého řídicího systému stroje.
- Krokové motory jsou osazeny inkrementálním optickým snímačem s vysokým rozlišením 10 000 nebo 20 000 pulzů na 1 otáčku, který zaručí velmi přesné polohování bez ztráty kroku.
- Rozhraní EtherCAT poskytuje vysokou komunikační rychlost 100 Mbit/s v plně duplexním provozu. Díky tomu má systém minimální prodlení a přesnou synchronizaci vzájemně propojených pohonů.
- Řídicí jednotka má pokročilé funkce polohování a řízení rychlostí včetně možnosti referování na snímač či mechanickou překážku (Homing mód).
- Systém Ezi-SERVO II EtherCAT ALL podporuje tyto poziční módy: řízení polohy profilu (Profile Position Mode – PP), řízení homingu (Homing Mode – HM) a řízení cyklické synchronní polohy (Cyclic Synchronous Position Mode – CSP)
- Řídicí jednotka disponuje 3 vyhrazenými vstupy pro 2 limitní snímače (LIMIT+/LIMIT-) + 1 referenční snímač (ORIGIN) a 3 programovatelnými vstupy (In1~In3). Výstupní obvod disponuje 2 programovatelnými výstupy (Out1~Out2).
- Plynulý rotační pohyb je dosažen už od 0,2 ot/min.
- Možnost navýšení proudu motoru až na 150 % jmenovité hodnoty nastavením parametru běhového proudu (objekt 2007h – Run Current).
- Možnost krátkodobého navýšení proudu motoru při rozběhu až na 350 % jmenovité hodnoty proudu (objekt 2008h – Boost Current).
- Možnost vzájemného sesíťování až 65 535 dalších jednotek (os) s jedinečnou IP adresou u každé řídicí jednotky.
- Volitelně lze vybírat ze dvou různých provedení motorů a to ve verzi s konektory typu BINDER (-M) nebo alternativní verzi s konektory typu DECA/MOLEX/RJ45 (-R).
- Schopnost detekce poruchových stavů.
- Krokové motory všech velikostí mohou být doplněny o elektromagnetickou brzdu -BK.
- Ke krokovým motorům ze sestavy Ezi-SERVO II nabízíme přímé nebo úhlové planetové převodovky APEX Dynamics.
Klíčové vlastnosti:
- Integrace krokového motoru, enkodéru a řídicí jednotky do jednoho celku
- Snadná implementace do řídicího systému stroje
- Možno ovládat po sběrnici EtherCAT podle profilu zařízení CiA402
- Zpětnovazební systém s uzavřenou smyčkou a vysokým rozlišením
- Stabilní systém bez oscilací
- Rychlá odezva
- Redukce tepla a úspora energie
- Vylepšený průběh krouticího momentu v celém spektru otáček
- Výběr ze dvou provedení s odlišnými typy konektorů
|
Síťově řízené krokové motory po sběrnici EtherCAT Ezi-SERVO II EtherCAT ALL představuje integrovaný systém se sběrnicí EtherCAT a vysokorychlostním připojením 100 Mbit/s v plně duplexním provozu. Celý systém se chová jako slave modul s implementovaným profilem zařízení pro elektrické pohony CiA402. Tento systém podporuje 3 poziční módy a to Profile Position Mode (PP), Homing Mode (HM) a Cyclic Synchronous Position Mode (CSP).
|
|

Zpětnovazební systém s uzavřenou smyčkou Ezi-SERVO II je inovativní zpětnovazební systém s uzavřenou smyčkou, který pro monitorování aktuální polohy používá optický inkrementální enkodér s vysokým rozlišením.
Zpětná vazba enkodéru umožňuje systému Ezi-SERVO II vyhodnocovat aktuální pozici každých 50 mikrosekund. Díky tomu dokáže řídicí jednotka Ezi-SERVO II eliminovat ztrátu pozice či kroku a zajistit přesné polohování.
Jako příklad uveďme konvenční krokový motor s řídicí jednotkou, který může kvůli náhlé změně zatížení ztratit krok, zatímco Ezi-SERVO II automaticky koriguje pozici pomocí zpětné vazby enkodéru.
|
|
 Žádné ladění parametrů Žádné ladění parametrů
Pro zajištění výkonnosti stroje, plynulého chodu, eliminace poziční chyby a nízké hladiny šumu vyžadují konvenční servo systémy v prvotní fázi ladění zpětnovazebních parametrů (např. proporcionální, integrační a derivační složky) jako výchozí krok pro dosažení stabilního chování systému.
Dokonce i systémy, které používají automatické ladění (auto-tuning), vyžadují po nainstalování a oživení stroje ruční doladění parametrů, zejména pokud se v zařízení používá více než jedna nezávislá osa.
Ezi-SERVO II disponuje pokročilou zpětnovazební kontrolou polohování a algoritmem, které dohromady eliminují potřebu zdlouhavého ladění parametrů vyžadované u konvenčních zpětnovazebních servo systémů.
To znamená, že systém Ezi-SERVO II je optimalizován pro danou aplikaci a připraven pracovat ihned po vybalení z krabice.
Systém Ezi-SERVO II využívá jedinečných vlastností při řízení krokových motorů se zpětnou vazbou, čímž eliminuje tyto těžkopádné kroky a poskytuje programátorovi velmi výkonný servo systém, aniž by ztrácel čas s komplexním nastavováním.
Ezi-SERVO II se hodí zejména pro aplikace s menší tuhostí zátěže (například pro pásový a kladkový systém), které občas vyžadují konvenční servo systémy s objemnou a drahou převodovkou pro potlačení setrvačnosti zátěže.
Ezi-SERVO II lze také výjimečně použít pro aplikace s vysokým zatížením a vyšší dynamikou.
|
|
| Redukce tepla / úspora energie
Ezi-SERVO II automaticky řídí proud motoru podle aktuálního zatížení. To znamená, že redukuje proud při nízkém zatížení a naopak jej zvyšuje při větším zatížení.
Optimalizací proudu motoru je dosaženo snížení tepla a úspory energie, resp. nízké spotřeby systému.

|
|
 Navýšení krouticího momentu Navýšení krouticího momentu
(proudové nastavení motoru)
Ezi-SERVO II dokáže navýšit proud motoru až na 150 % jmenovité hodnoty nastavením parametru běhového proudu (Run Current). Díky tomu může být průběh akcelerace, decelerace a krouticího momentu v nízkých rychlostech vyšší. Krouticí moment tak může být v nízkých rychlostech vylepšen přibližně o 30 %.
|
|
 Žádné vibrace a oscilace Žádné vibrace a oscilace
Konvenční servomotory přejíždí svou cílovou polohu a snaží se jí korigovat reverzováním otáček, což se děje zejména v aplikacích s vysokým zesílením.
Tento jev převládá zvláště v systémech, kde je odtržení nebo statické tření výrazně větší, než dynamické tření. Cílem je snížit zesílení, což ovlivňuje přesnost nebo použít polohově řízený systém Ezi-SERVO II.
Ezi-SERVO II využívá jedinečných vlastností krokových motorů a díky tomu dokáže zablokovat hřídel v požadované cílové poloze, aniž by došlo k překmitům mimo žádanou polohu.
Tato funkce je užitečná zejména v aplikacích, jako je výroba nanotechnologií, polovodičů, kamerové systémy a inkoustový tisk, v nichž by oscilace a vibrace systému mohly být problémem.
|
|
 Hladké a přesné polohování Hladké a přesné polohování
Systém Ezi-SERVO II tvoří vysoce přesný krokový motor, který je osazený inkrementálním enkodérem s rozlišením až 20 000 pulzů na otáčku.
Na rozdíl od konvenčního driveru s mikrokrokováním, provádí vysoce výkonný mikroprocesor (MCU) osazený na základní desce řídicí jednotky Ezi-SERVO II vektorové řízení a filtrování, které vytváří plynulé řízení rotace s minimálními zvlněním.
|
|

Rychlá odezva Podobně jako u konvenčních krokových motorů, se dokáže Ezi-SERVO II okamžitě synchronizovat s řídicími pulzy (vstupními povely) a dosáhnout tak rychlé odezvy při polohování.
Ezi-SERVO II je optimální volbou, pokud je vyžadována stabilita v přídržné poloze a rychlé změny polohy na krátkou vzdálenost.
Tradiční servo systémy mají přirozenou prodlevu, tzv. čas ustálení mezi řídicími vstupními povely a výsledným pohybem kvůli neustálému monitorování aktuální polohy.
|
|
| Vysoké rozlišení
Krokový motor systému Ezi-SERVO II je osazen vysoce přesným inkrementálním enkodérem s rozlišením až 20 000 pulzů na otáčku s možností 11 úrovní softwarového přenastavení.
|
|
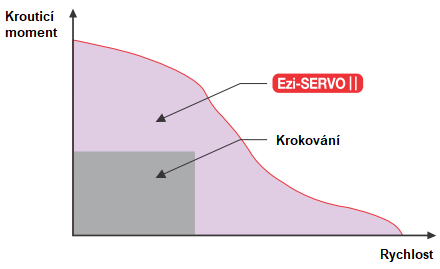
| Vysoký krouticí moment
Ve srovnání s běžnými krokovými motory a drivery dokáže systém Ezi-SERVO II udržovat vysoký krouticí moment v poměrně velkém spektru otáček. To znamená, že Ezi-SERVO II nepřetržitě pracuje bez ztráty pozice při 100% zatížení. Na rozdíl od konvenčních driverů s mikrokrokováním využívá Ezi-SERVO II vysoký kontinuální krouticí moment ve vyšších rychlostech pohybu díky inovativnímu a optimálnímu řízení proudu fáze.
|
|
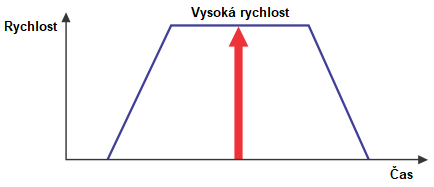
| Vysoká rychlost
Ezi-SERVO II dobře funguje ve vysokých rychlostech bez ztráty synchronizace nebo poziční chyby. Schopnost tohoto systému průběžně monitorovat aktuální polohu umožňuje krokovému motoru generovat vysoký krouticí moment, a to i při 100 % zatížení.
 |


Pro tento produkt není konfigurátor k dispozici.
- Krokové motory Ezi-SERVO II EtherCAT ALL-42 Typ M - CAD modely a výkresové listy
- Krokové motory Ezi-SERVO II EtherCAT ALL-56 Typ M - CAD modely a výkresové listy
- Krokové motory Ezi-SERVO II EtherCAT ALL-60 Typ M - CAD modely a výkresové listy
- Krokové motory Ezi-SERVO II EtherCAT ALL-86 Typ M - CAD modely a výkresové listy
- Krokové motory Ezi-SERVO II EtherCAT ALL-42 Typ R - CAD modely a výkresové listy
- Krokové motory Ezi-SERVO II EtherCAT ALL-56 Typ R - CAD modely a výkresové listy
- Krokové motory Ezi-SERVO II EtherCAT ALL-60 Typ R - CAD modely a výkresové listy
- Krokové motory Ezi-SERVO II EtherCAT ALL-86 Typ R - CAD modely a výkresové listy
FASTECH: Ezi-SERVO II EtherCAT ALL – tříosý mini delta robot
Demonstrační tříosý mini delta robot řízený pomocí Ezi-SERVO II EtherCAT ALL prostěrdnictvím sběrnice EtherCAT. Absence převodovky, vysoký krouticí moment a krátký zdvih poskytují výborné vlastnosti pro velmi přesné a synchronní řízení delta robota.